Dear all,
These days I meet a problem about the axisymmetric NS equations. I solve [u,p] with test function[v,phi] and when I wrote the weak form I found a problem, for example the term of pressure gradient on the right hand side.
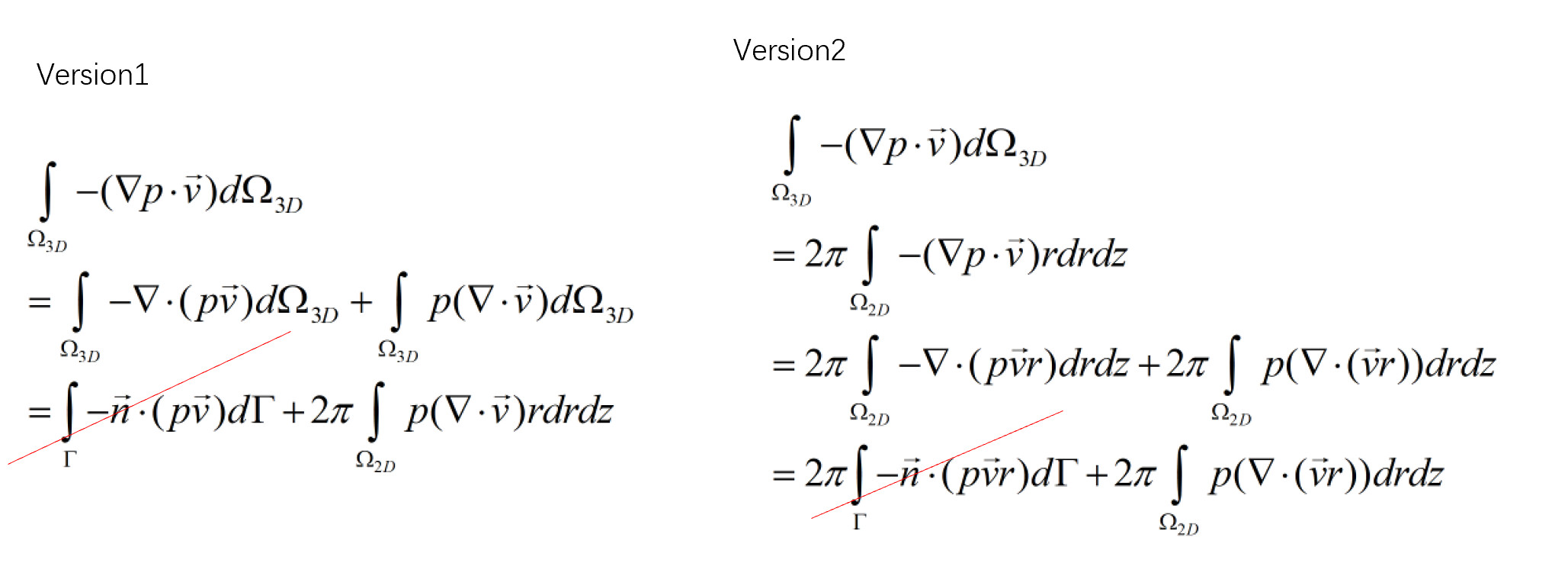
For an axisymmetric function F(r,z), we can write that:
(the macro div is for the divergence operator in the cylindrical coordinate, here just to make sense)
I found both ways in some literature or code, but I don’t quite understand.
(One reason I think is that in the two results, the div operator is defined in the cylindrical coordinate for the first form and in the Cartesian for the second form , but I am not so sure now)
And another problem is that: in some literature, some author wrote that the singularity is treated with multiplication by r (or even r^2). But I think the r is naturally arising from the integral in cylindrical coordinates ( the Jacobian matrix for coordinate transformation). I don’t know if I understand right…
This r is part of the differential volume and should not be confused as part of the integral argument during integration by parts.
I agree that the wording “pre multiplication by r^2” is probably an innocent mistake, that has now been repeated a few times in the literature. The factor of r in the Jacobian of the coordinate transformation removes all inviscid (1/r) singularities by itself. An additional factor of r introduced to the strong form before deriving the weak form (ie premultiplied by r) can be helpful to remove the viscous singularities (1/r^2). You can see an example of this in one of my papers. However, it should be noted that either approach can cause problems along the central axis depending on how BCs are enforced. Personally, I have moved to favor the former approach over the latter.
I have found that sometimes I misunderstand the r from the Jacobian or pre multiplied to the strong form, but now I get it. Thank you very much for your reply!